|
||||||
|
||||||
DOCUMENTS
elab.immagini
galileo
orgoglio
realtà virtuale
vrml
biomeccanica
esapodi
formula1
intelligenza
takoma
Papers
meccanica
sistemi
robotica
Parte 1 - Parte 2 - Parte 3 - Parte 4- Parte 5 - Parte 6 - Parte 7
Robotica, la riproduzione delle articolazioni
Vista la natura tridimensionale di ognuno dei
giunti che abbiamo visto essere necessari per la duplicazione artificiale
di un arto inferiore umano, ci si può rendere conto come una semplificazione
è strettamente necessaria, pena l’aumento della difficoltà del controllo
dei gradi di libertà che si moltiplica con il numero delle gambe e del tipo
di interazione che devono avere tra loro.
I gradi di libertà dell’anca che permettono un così ricco set di movimenti come quelli fisiologici vengono ridotti sulla base del tipo di compito e quindi del tipo di implementazione meccanica utilizzata per quel giunto, per il quale il robot è progettato. Un giunto che permetta la completa mobilità dell’arto può venire realizzato a patto di modificare però completamente quelle che sono le caratteristiche dell’ispirazione biologica dalle quali si vuole trarre spunto. I fattori stessi che mantengono a contatto e stabilizzano i capi articolari sono pressoché impossibili da replicare artificialmente: i legamenti e i fasci muscolari lavorano secondo una logica difficile da ricostruire con le tecniche ed i materiali che abbiamo a disposizione a livello costruttivo. Il modo nel quale sono montate le superfici di contatto, l’effetto combinato dei legamenti che le mantengono unite e il ruolo attivo dei muscoli nella mobilità dell’articolazione deve venire necessariamente semplificato per poter essere ricostruito in maniera affidabile e funzionale. Le diverse articolazioni possono essere modellate sulla base del movimento relativo che permettono tra i due capi articolari che esse collegano.
Dal punto di vista della semplice cinematica queste possono dividersi in: articolazioni a superfici piane (artrodia), a superfici sferiche (enartrosi), a superfici ellissoidali (condilartrosi), a superficie curvilinea convessa e concava (articolazioni a sella) ed infine a superficie di contatto cilindrica (ginglimi laterali ed angolare). Per questo in ambito robotico si limita la funzionalità di ogni giunto sulla base del compito che l’arto deve svolgere, che il più delle volte è quello del puro camminamento piano. La semplificazione non è ovviamente possibile quando si parla invece di protesi articolari, che sebbene abbiano alcuni aspetti meccanici uguali a quelli della robotica del camminamento, evidentemente debbono essere invece in grado di svolgere tutte le funzioni biologiche delle loro simili naturali.
La meccanica della deambulazione è stata e viene ampiamente studiata, la sua replica robotica attualmente è orientata al supporto dello studio cinematico e dinamico di questo meccanismo più che ad una sua effettiva duplicazione per scopi applicativi, perlomeno nella sua forma bipede. Spesso, quindi, i problemi di ordine pratico sul controllo vengono risolti utilizzando più gambe (robot a 4 o 6 zampe).
I gradi di libertà che ogni giunto permette vengono quindi ridotti sulla base delle osservazioni sulla cinematica articolare durante il camminamento. Se è possibile dividere la normale sequenza di movimenti per il singolo passo (gait) secondo la posizione del piede (l’end effector robotico) riconoscendo due fasi (una di Stance e una di Swing) allora è possibile indicare i valori delle diverse coordinate articolari necessari per raggiungere tale posizione.
Si può osservare allora come in tutte le tre
articolazioni, le variabili di giunto abbiano diverse escursioni, secondo
i gradi di libertà fisiologici visti.
Ad esempio per l’articolazione dell’anca le variazioni sono tutte
diverse da zero, con un ordine di grandezza diverso però per quella sagittale:
Le leggi di moto nel piano sagittale, che i diversi
giunti seguono durante il passo, e che sono riportate nel diagramma vengono
indicate rispetto alla posizione di riposo assunta.
Si evince quindi come nel compito di camminamento, e in una certa misura anche
per altri tipi di compito, si possano inizialmente considerare i giunti come
monodimensionali, trascurandone le oscillazioni nei piani frontali e orizzontali.
Le variazioni nel piano sagittale determinano il pattern del camminamento
e quindi le variazioni nel passo.

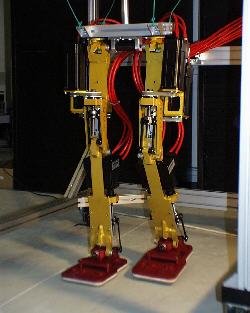
Le variabili d’interesse si riducono sostanzialmente a 6: le due rotazioni delle anche, le due rotazioni delle ginocchia e le due rotazioni delle caviglie. Il meccanismo di camminamento viene così notevolmente semplificato. Il movimento dell’anca nella direzione di abduzione e adduzione viene implementato attraverso un particolare cedimento del giunto rappresentante l'anca, oppure, più spesso, spostando il centro di massa del tronco in direzione trasversale in modo da equilibrare le reazioni del contatto piede-superficie.
Spesso, con approssimazioni ancora più spinte, in robotica si usa ulteriormente ridurre le variabili realizzando il complesso cinematismo del giunto caviglia+piede con una soluzione meccanica specifica. L’adattabilità di queste soluzioni risente ovviamente delle ristrettezze sul compito al quale il robot è destinato e comunque il ricorso a strutture meccaniche più sofisticate non è ancora necessario.
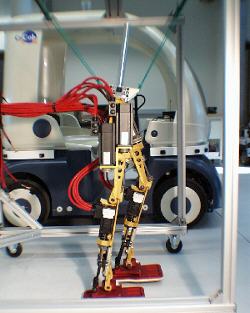
L’utilizzo di due soli parametri per gamba nell’analisi del moto offre comunque soluzioni buone per il camminamento su superificii lisce. La costruzione di un modello di camminatore passivo, ovvero capace di muoversi lungo piani inclinati per effetto gravitazionale, permette di modellare roboticamente un arto inferiore in maniera semplice.
In questo modo il risultato che si ottiene è comunque qualitativamente sovrapponibile al reale andamento delle variabili di giunto biologiche.
Maggiore verosimiglianza biologica si può ottenere, comunque, studiando cinematismi specifici a livello meccanico. I tre gradi di libertà che abbiamo visto in ogni giunto possono essere implementati meccanicamente utilizzando soluzioni ad hoc. Un giunto che si comporta cinematicamente come un equivalente biologico può essere costruito utilizzando due o tre attuatori specifici ed un meccanismo articolato che ne permetta la combinazione dei gradi di libertà.
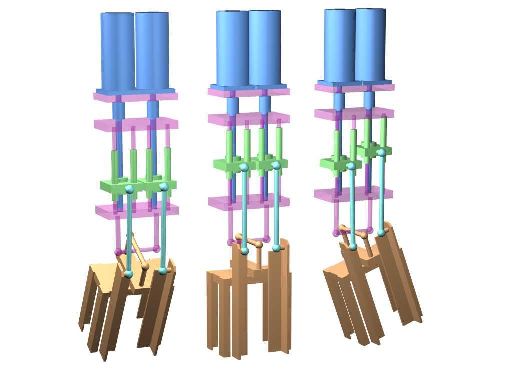
La flessione e l’adduzione sono garantite dalla combinazione del moto degli attuatori, l’eventuale grado di libertà di rotazione può venire impresso utilizzando un terzo attuatore.

Il meccanismo di camminamento può venire allora efficacemente riprodotto utilizzando giunti di diversa capacità per le diverse articolazioni, soprattutto in funzione del tipo di compito al quale il robot è destinato.
Parte 1 - Parte 2 - Parte 3 - Parte 4- Parte 5 - Parte 6 - Parte 7

